Ankopplung (Raumfahrt)
- Seiten mit defekten Dateilinks
- Seiten mit Skriptfehlern
- Raumfahrttechnik
- Bemannte Raumfahrt
Als Ankopplung (englisch docking) wird in der Raumfahrt die Verbindung zweier Raumschiffe oder Module während eines Weltraum-Rendezvous bezeichnet, die sich dazu auf einer fast identischen Bahn befinden müssen. Eine spätere Lösung der Verbindung heißt Abkopplung.
Das Ankoppeln eines Raumschiffs an eine Raumstation wird auch als Anlegen (englisch berthing) bezeichnet.
Allgemeines
Der Zweck der Ankopplung kann ein rein technischer sein (gemeinsame Stromversorgung, Datenaustausch usw.) oder (in der bemannten Raumfahrt), um der Besatzung den Überstieg in ein anderes Modul oder in eine Raumstation zu ermöglichen. Die bisher benutzten Module, zum Beispiel die Module der Raumstation Mir dienten unter anderem zur Himmels- und Erdbeobachtung und für biologische, technische oder physikalische Experimente.
Für den Überstieg einer Mannschaft muss der Verbindungskanal völlig luftdicht sein und eine lichte Weite von mindestens 70 cm aufweisen, bekleidet mit einem Raumanzug etwa 100 cm. Nach dem Raketenstart zum Besatzungswechsel auf der Internationalen Raumstation erfolgt die Ankopplung innerhalb von zwei Tagen, nach dem neuen Regime schon nach 6 Stunden.
Damit zwei Raumfahrzeuge aneinander koppeln können, müssen ihre Umlaufbahnen nahezu identisch sein und ihre gegenseitige Geschwindigkeit ein technisch vorgegebenes Limit unterschreiten, das bei empfindlichen Modulen im Bereich einiger Zentimeter pro Sekunde liegt (und dies bei Bahngeschwindigkeiten zwischen 7 und 8 km/s). Die Annäherung der beiden Bahnen erfolgt in der Regel schrittweise, da die einzelnen hierzu nötigen Bahnmanöver nicht mit letzter Genauigkeit möglich sind; dazwischen sind genaue Bahnbestimmungen erforderlich, die zumeist durch terrestrische Bodenstationen unterstützt werden.
Erst in der letzten Annäherungsphase – sobald Sichtkontakt besteht und die Distanzen unter einigen Kilometern liegen – ist eine direkte Ansteuerung durch die Raumfahrer möglich und sinnvoll. Hilfsmittel dafür sind Radar, Dopplereffekt und visuelle Kreuzpeilung. Die vollautomatische Ankopplung wurde von Russland ab etwa 1970 entwickelt und seit etwa 2000 allgemein üblich. Hierfür typische Docking-Relativgeschwindigkeiten sind:
- Space Shuttle: 2 cm/s
- Sojus / Progress: 25 cm/s
- ATV: 7 cm/s
Die erste Ankopplung der Raumfahrt erfolgte am 16. März 1966 durch Gemini 8, gesteuert durch Neil Armstrong und David Scott. Kopplungspartner war das Gemini Agena Target Vehicle, ein unbemannter Zielsatellit.
Die erste automatische Ankopplung wurde von zwei unbemannten Sojus-Raumschiffen durchgeführt: Kosmos 186 und 188 koppelten am 30. Oktober 1967.
Im Juni 1997 führte ein fehlgeschlagenes Ankoppelungsmanöver eines Progress-Raumschiffs mit der Raumstation Mir zur Kollision mit dem Spektr-Modul der Raumstation, welches dabei schwer beschädigt wurde. Dabei war das Leben der damaligen Mir-Besatzung ernsthaft in Gefahr.
Der russische Ingenieur Wladimir Siromjatnikow[1] gilt als Übervater der russischen Dockingmodule.
Sowjetische bzw. russische Kopplungssysteme
Kopplungssystem Kontakt
Für das Mondprogramm wurde ein Kopplungssystem namens Kontakt entwickelt. Es bestand aus einem passiven und einem aktiven Teil. Der aktive Teil am Mondraumschiff Sojus 7K-LOK sollte in eine Platte mit mehreren Löchern am Mondlandemodul LK einhaken. Dieses System kam aber aufgrund der Probleme mit der Mondrakete N1 nie zum Einsatz.[2]
- Kontakt docking system.png
Kontakt-Kopplungssystem
Kopplungssystem des 7K-OK
Auch dieses System besteht aus einem passiven und einem aktiven Teil. Der passive Teil hat die Form eines Trichters und nimmt den aktiven Teil auf. Dieses System wurde zur Kopplung von Sojus-Raumschiffen untereinander entwickelt. Es koppelte die beteiligten Raumschiffe mechanisch und elektrisch aneinander. Allerdings bestand keine Möglichkeit für die Raumfahrer durch den Kopplungsadapter hindurch die Raumschiffe zu wechseln. Ein Umstieg konnte nur mittels eines Weltraumaustiegs durchgeführt werden. Erstmals kam das System beim Flug der unbemannten Sojus-Raumschiffe Kosmos 186 und 188 zum Einsatz.[2]
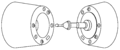
Kopplungssystem des 7K-OK: rechts der aktive und links der passive Part

SSWP
Das Kopplungssystem wurde für die Kopplung der Sojus-Raumschiffe mit den Saljut-Stationen entwickelt und besteht aus einem aktiven und passiven Teil. [3]
- Soyuz 7K-T docking system drawing.png
Kopplungssystem seit 7K-T: rechts der aktive und links der passive Part, bis heute im Einsatz
APAS
Das Androgynous Peripheral Attach System (APAS) ({{Modul:Vorlage:lang}} Modul:ISO15924:97: attempt to index field 'wikibase' (a nil value), Gerät zum passiven peripheren Koppeln) wurde 1975 als APAS-75-System für das Apollo-Sojus-Test-Projekt entwickelt. Danach entstand daraus das APAS-89-System für die Kopplung der Raumfähre Buran an die Raumstation Mir. Mittels eines Adapters konnten auch US-amerikanische Space Shuttles an der Mir an dem System andocken. Für die ISS wurde zur Kopplung der Space Shuttles das System als APAS-95 weiterentwickelt.

Systemskizze APAS-75 von Sojus 7K-TM
- APAS-89 docking system drawing.png
Das androgyne Kopplungssystem APAS-89 von Buran, für das Space Shuttle zu APAS-95 weiterentwickelt

US-amerikanische Kopplungssysteme
Dockingsystem der Apollo
Konzeptionell ähnlich dem System der Sojus bestand das Dockingsystem des Apollo-Raumfahrzeuges aus einem aktiven Teil am Kommandomodul (CM) und einem passiven Teil an der Mondlandefähre (bzw. am MDA im Falle von Skylab). Die Sonde des aktiven Teils wurde, durch eines der beiden Raumschiffe gesteuert, in den Kegel des passiven Teils eingeführt und durch ein Federsystem herangezogen. Am Außendurchmesser rasteten daraufhin zwölf krallenartige Riegel ein und verbanden die Fahrzeuge fest miteinander. Sonde und Kegel mussten anschließend manuell entfernt und gelagert werden. Die Verbindung war einerseits elektrisch durch Entriegelung der Riegel, andererseits pyrotechnisch durch Absprengen der gesamten Dockinghardware (die dann auf der passiven Seite verblieb) trennbar.
- U.S. Drogue.jpg
Passiver Teil
- Apollo probe.jpg
Aktiver Teil von Apollo
Ankopplung an der Internationalen Raumstation ISS
Zur Kopplung der Module der ISS kommen dem Zweck entsprechend verschiedene Kopplungsmechanismen zum Einsatz. Es gibt Adapter zur Kopplung von unter Druck stehenden Teilen wie auch Adapter zur Kopplung von nicht unter Druck stehenden Modulen oder Geräteträgern. Der russische Teil verwendet die schon in der Sowjetunion entwickelten Systeme, der US-amerikanische Teil entsprechend andere. Zur Kopplung beider Teile wurde der PMA-1 eingesetzt.
APAS-95
Das russische „Androgynous Peripheral Attach System“ (APAS-95)[4] ist die Weiterentwicklung des APAS-89-Systems. Es wird für die Verbindung des russischen Teils mit dem US-amerikanischen Teil der ISS am PMA-1 eingesetzt. Außerdem kommt es zum Andocken von Zubringerfahrzeugen an den Pressurized Mating Adaptern zum Einsatz.[5]
APAS-95 im aktiven Betriebsmodus am Space Shuttle
- APAS-95 passive side.jpg
APAS-95 im passiven Betriebsmodus an PMA-2
SSWP G4000
Dies ist der passive Teil des Sojus-Kopplungssystems und ist an Pirs, Poisk, Rasswet und Swesda zum Koppeln von Sojus, Progress und ATV verbaut.
- Pirs docking module taken by STS-108.jpg
Passiver Kopplungsadapter des Sojustyps an Pirs

Aktiver Kopplungsadapter an dem russischen Raumfrachter Progress

SSWP M8000
Das SSWP M8000 ist ein sogenanntes Hybrid-System, das aus SSVP und APAS für die Kopplung der großen russischen Module entwickelt wurde. Dieses nutzt den Außenring des APAS und das "Trichter-Stangen"-Design des SSWP. Damit hat es einen größeren Durchmesser als das SSWP G4000. Zum Einsatz kommt es zur Kopplung der Module Sarja, Swesda, Pirs und Poisk.
- ISS S01 Pirs airlock.jpg
Pirs-Modul kurz vor dem Andocken an die ISS. Man sieht den aktiven Kopplungsstutzen des Hybrid-Systems, mit dem das Modul an der Station koppelt
CBM
Der US-amerikanische „Common Berthing Mechanism“ (CBM) ist mit 127 cm Durchmesser auch für große Frachtstücke geeignet. Er verbindet die US-amerikanischen Teile der ISS und wurde zum Andocken mit dem Multi-Purpose Logistics Module verwendet. Jetzt nutzen das japanische HTV-Versorgungsraumschiff, die Dragon und die Cygnus diesen Mechanismus.
- STS-114 Raffaello module.jpg
MPLM, Shuttle-Frachtmodul
HTV, japanisches Versorgungsmodul
- PMA-1 KSC.jpg
PMA-1, die russisch-amerikanische Verbindungsstelle der ISS
LIDS
Das US-amerikanische Low Impact Docking System (LIDS), andere Bezeichnungen auch NASA Docking System (NDS) und international Low Impact Docking System (iLIDS), war für die Ankoppelung des ursprünglich geplanten und mittlerweile eingestellten X-38 Crew Return Vehicle vorgesehen. Es stellt die nächste Generation des APAS-Kopplungadapters dar.[5] Ursprünglich sollte das Orion-Raumschiff ebenfalls mit diesem Adapter versehen werden, um an der ISS andocken können.[6] Nachdem die NASA keine Flüge des Orion-Raumschiffs mehr zur ISS plant wurde dieses Projekt eingestellt.
- Low-Impact Docking System.jpg
Low-Impact Docking System
- View of APAS to NDS docking adapters.png
PMA-2 und PMA-3 mit Adapterringen
IDA
→ Hauptartikel International Docking Adapter
IDA basiert auf dem internationalen Standard IDSS und soll zukünftig von den bemannten Raumschiffen CST-100 Starliner und Dragon V2 im Rahmen des kommerziellen Crew-Programs genutzt werden.
SSAS
Das Segment to Segment Attachment System (SSAS) verbindet Teile der Integrated Truss Structure: S0 mit S1, S1 mit S3, sowie S0 mit P1 und P1 mit P3.
RTAS
Das Rocketdyne Truss Attachment System (RTAS) verband Z1 mit P6 während des Aufbaus der Station. Nach der Fertigstellung verbindet das RTAS P6 mit P5 und S6 mit S5.
MRTAS
Das Modified Rocketdyne Truss Attachment System (MRTAS) besteht je aus einem passiven und aktiven Teil und verbindet P5 mit P4 und S5 mit S4.
Siehe auch
- Zur Theorie der Bahnübergänge siehe Himmelsmechanik und Übergangsbahn.
Literatur
- Albert Ducrocq: Sieg über den Raum, rororo 1961
- Richard Heinrich Giese: Raumfahrttechnik Band I, Bibliogr.Institut, Mannheim 1966
- R. Wallisfurth, Rußlands Weg zum Mond. Econ-Verlag, Wien-Düsseldorf 1964
Weblinks
{kind=link}
Quellen
- ↑ James Oberg: When two spacecraft meet, they rely on Vladimir Syromyatnikov. IEEE Spectrum, 1. April 2006, abgerufen am 29. Juni 2013 (Lua-Fehler in Modul:Multilingual, Zeile 149: attempt to index field 'data' (a nil value)).
- ↑ 2,0 2,1 David S. F. Portree: MIR Hardware Heritage. (PDF; 4,0 MB) NASA, 1995, abgerufen am 28. Juni 2013 (Lua-Fehler in Modul:Multilingual, Zeile 149: attempt to index field 'data' (a nil value)).
- ↑ Anatoly Zak: Docking system. RussianSpaceWeb, 30. März 2013, abgerufen am 29. Juni 2013 (Lua-Fehler in Modul:Multilingual, Zeile 149: attempt to index field 'data' (a nil value)).
- ↑ http://suzymchale.com/kosmonavtka/issdock.html
- ↑ 5,0 5,1 ISS Interface Mechanisms and their Heritage. (PDF; 3,4 MB) NASA, abgerufen am 4. November 2011 (englisch).
- ↑ NDS Configuration and RequirementsChanges since Nov 2010. (PDF; 1,3 MB) NASA, 14. Juni 2010, archiviert vom Original am 15. Februar 2013; abgerufen am 7. November 2011.